Mechanical And Building
The team started its second week of build season strong by continuing to prototype. Different members from the team have all had the opportunity to contribute ideas to our main concepts and designs. This past week has been a good chance for everyone, even non-mechanical committee members, to get involved and participate.
We were able to make a starting model for our vision system. It allows us to use the robot as a camera to see our surroundings. This will be able to help us in the future when we are trying to accurately and efficiently line up game pieces during a match (this method was very beneficial in previous games).
We have so far been making four different prototypes for our hatch panel and ball pick-ups.
Figure #1
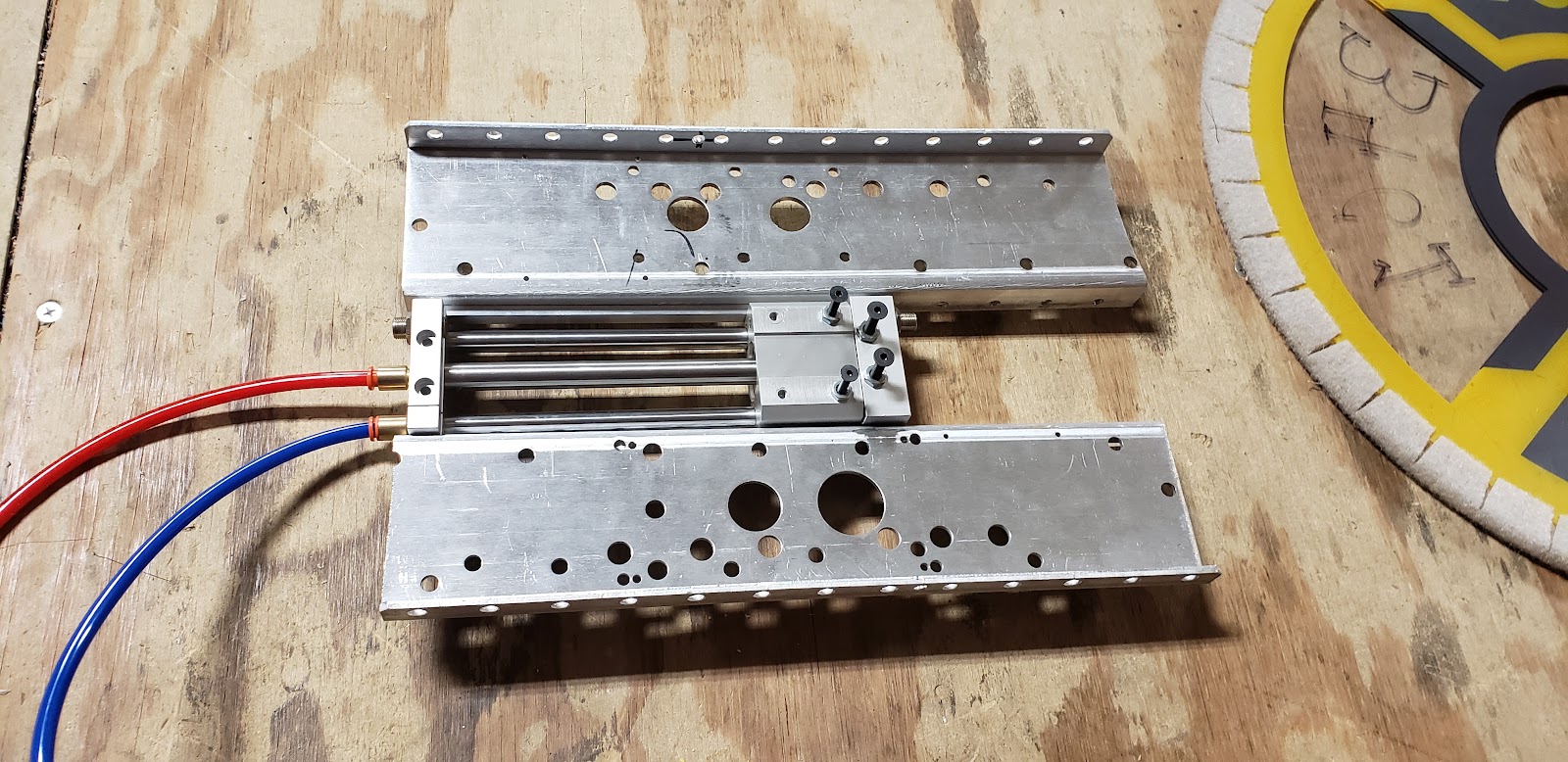
As shown in Figure #1, this prototype will be attached to the front of our robot. It is made using a piston with countersunk screws to pick up from the middle of the hatch panel.
Figure #2

This prototype (Figure #2) is made using stationary velcro blocks and pistons that extend towards the hatch panel and launching it into the capsule.
#Figure 3

This next model (Figure #3) is the opposite of the Figure #2; the velcro is attached to the pistons which retract and break off of the disc using pieces of maytec.
Figure #4

Lastly, this (Figure #4) is our ball intake prototype. It will be mounted on the back of our robot opposite hatch panel intake and it will collect the cargo using a spinning pool noodle. Afterwards, the ball will be moved through the middle of the robot using a conveyor belt system to be launched into the rocket and cargo ships.
Programming
Throughout this past week, we have been improving our VISION software. We were able to draw a line on the ground, and, using cameras, the robot followed the line successfully.
For 2019, one of the new challenges has been that the organizers have cut our bandwidth to 57% of previous years. This doesn’t even give us enough Bandwidth to watch Netflix if we wanted to. This week, we have found a way to get four cameras running under this reduced bandwidth constraint through compression and a great student idea to offload some video processing to a secondary Raspberry Pi 3 computer. In previous years, we had 7 megabits and now we only have 4.
We will soon have rudimentary object recognition. This will enable the robot to recognize where it is on the field and identify game pieces. Our goal by the end of the season is to have our robot to automatically place game pieces.
Awards
The members on our awards committee have been working hard on the Chairman’s award. Soon, we will be deciding on three members who will be doing the presentation at competitions in front of a panel of judges.
There are several different components that are involved in the Chairman’s award for our team. Currently, we have been focusing all of our time on the essay (the main part), but after we finish up with that we will start writing our speech which is based off of the essay. Additionally, our members are also working on creating a storyboard for our video. The video will be used to display our team after competitions if we win the award. For the presentation, we also make a poster board to go along with our speech that is again, based on the essay as well.
Another award which we have more recently started in past years is the Entrepreneurship award. It is an award based on business plans and budgeting. Similar to the Chairman’s award, it is also presented at competitions to judges in the pits.